about
I study CS at CMU, specifically in Deep Learning and Robotics. My broad interests are robot learning and generative models. My current focus is my research at CMU Robotics Institute on real2sim cloth folding, reinforcement learning, LLMs, and other related projects in these areas.
Very eager to connect with you if you share the same interests
todo: add links/demos later
projects
2025
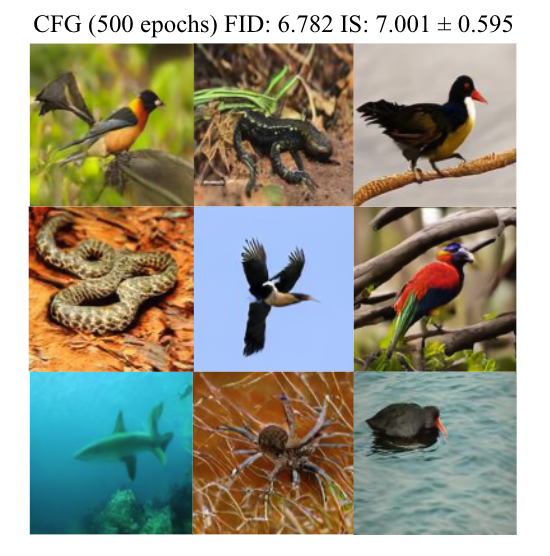
Image Generation Implemented DDPM/DDIM with CFG and VAE encoding trained with UNet on ImageNet-100 with 8xH100s on PSC. Also tried VAE reconstruction on faces.
Household Robot Finetuned VLA (π0.5, SmolVLA) on cloth folding tasks, succeeding almost 100% of time on trained tasks - pretraining allows robot to adapt to disruptions/mistakes as well. Also trained behaviorial cloning (Stanford ACT) on same task + other pick and place tasks.
2024
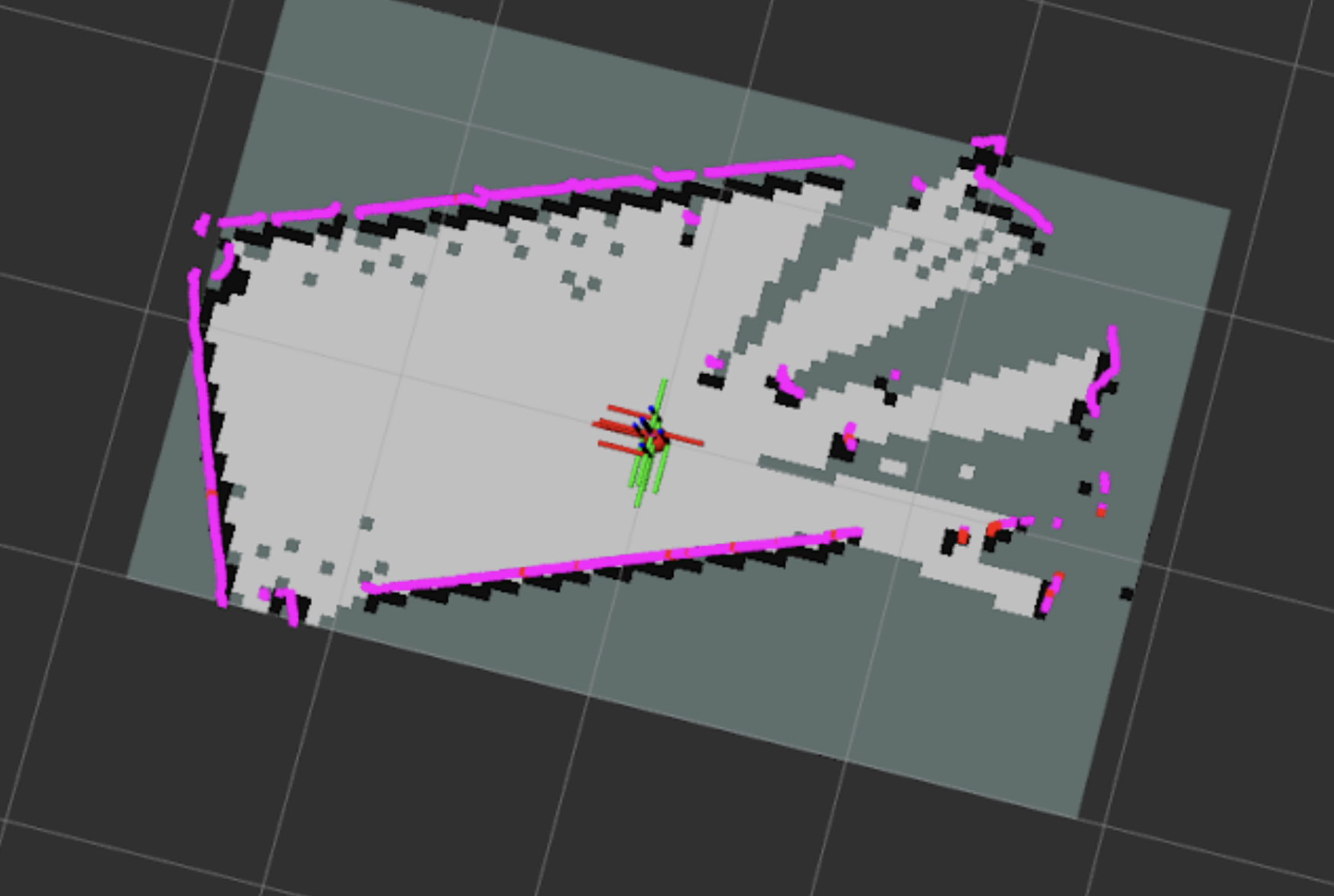
SLAM Robot Implemented differential drive controller, EKF, sensor fusion, and 2D LiDAR SLAM in ROS2 Humble - simulated in Gazebo.
2023
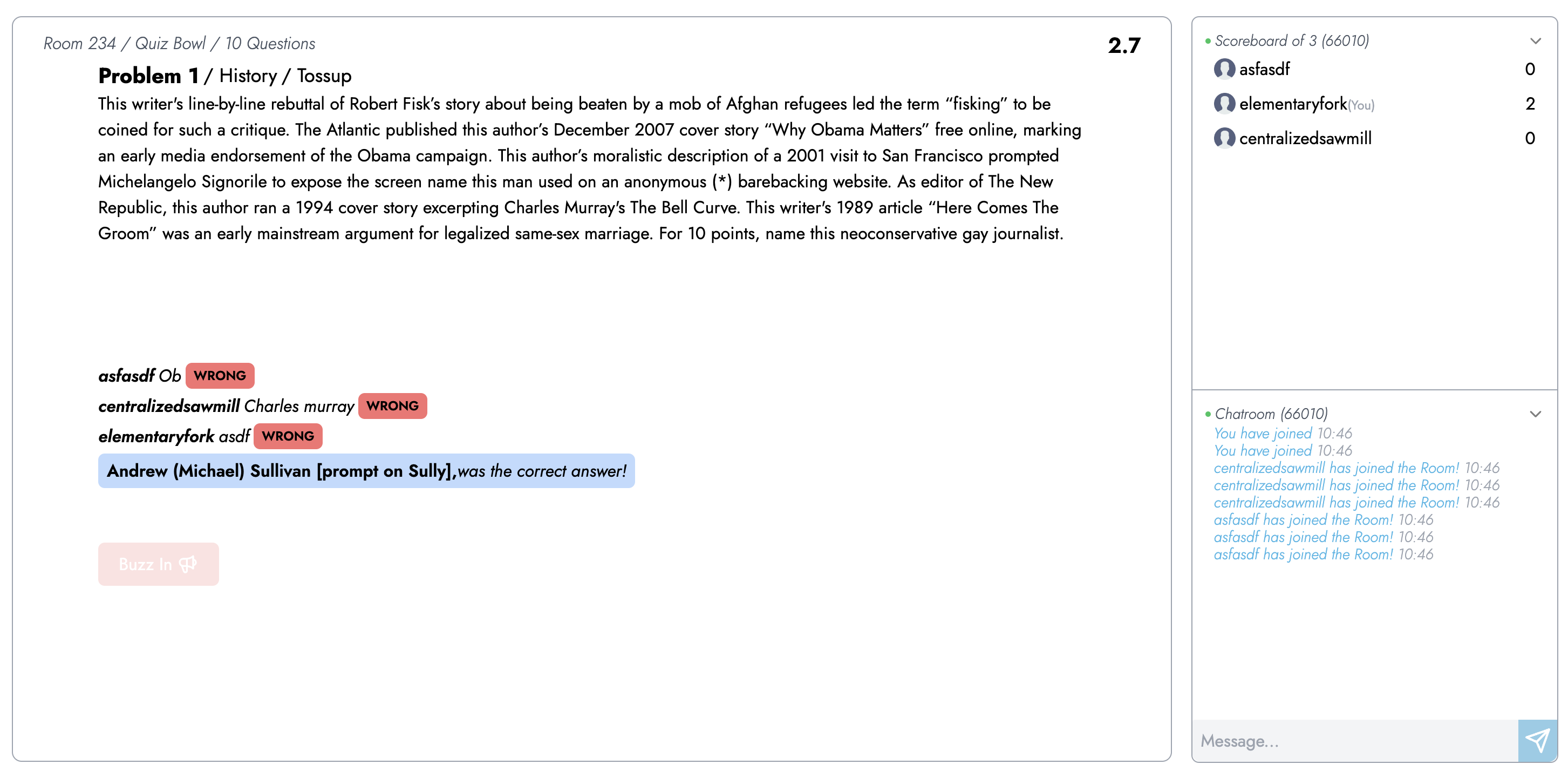
STEM Competition Web App Designed and built a multiplayer web app for lobbies and competing against players in science bowl/mathcounts Countdown games in real-time before agentic IDEs existed.
when i was more interested in hardware
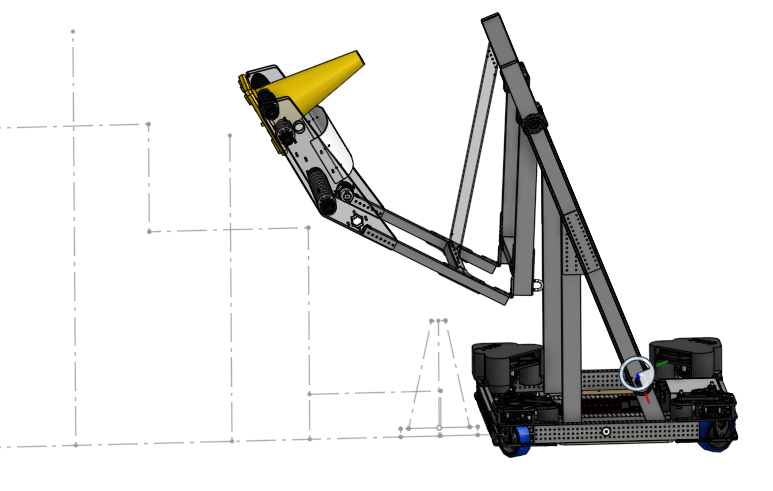
FRC 7419 (9919) ChargedUp Robot Led the design, fabrication, assembly, and programming of a) omnidirectional drivetrain b) lowered center of gravity c) lower four-bar arm linkage for FRC 7419's offseason "ChargedUp" Robot - This year's game aimed to pick-and-place cube balloons and traffic cones in versatile positions.

Quadcopter FPV Drone A simple wiring, assembly, and installation for a quadcopter FPV drone.