Joshua Yang
I am a first year B.S. in Computer Engineering student at Carnegie Mellon University.
Currently I am involved in Carnegie Mellon Racing's driverless subteam and hoping to start a research apprenticeship at Robotics Institute this summer.
I'm most interested in exploring software problems related to AI and Robotics, but have dealt with other hardware projects too.

Projects
Here are some projects I've done related to my current interests and may be continuing to work on:
Software
2D Lidar SLAM with ROS
Personal Project
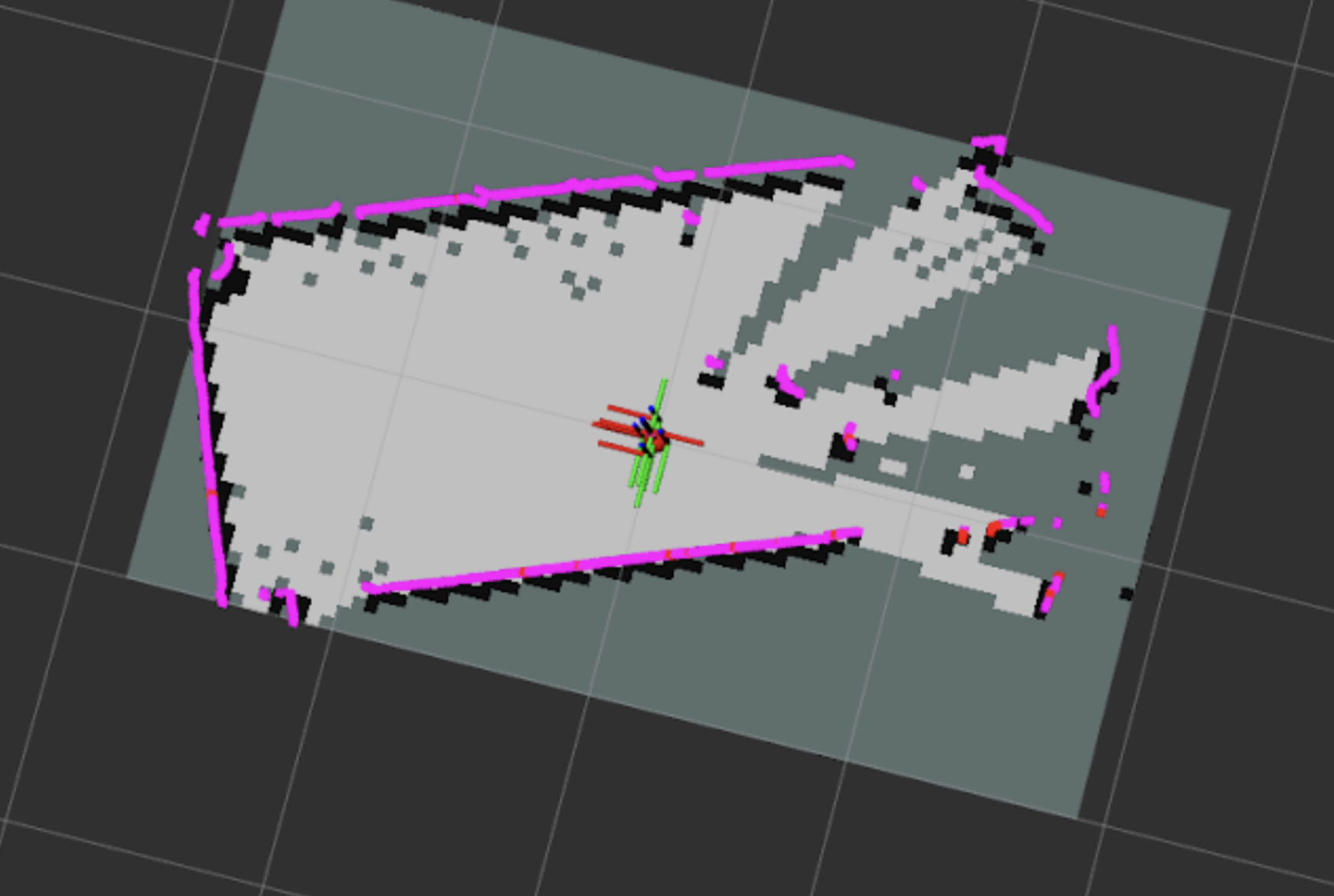
Through a ROS course, I implemented 2D SLAM using LiDar on open-source robot (variation of Turtlebot3) in simulation through Gazebo. This course relied heavily on pre-existing ROS2 packages (i.e. Nav2 for SLAM and ros2_control for controls) which heavily limited understanding, so I'm currently attempting to re-implement as many features (i.e. EKF and sensor fusion) from scratch. There are some issues with the hardware interface I am still debugging so I can test in real environments.
Search-Based Agents
Coursework
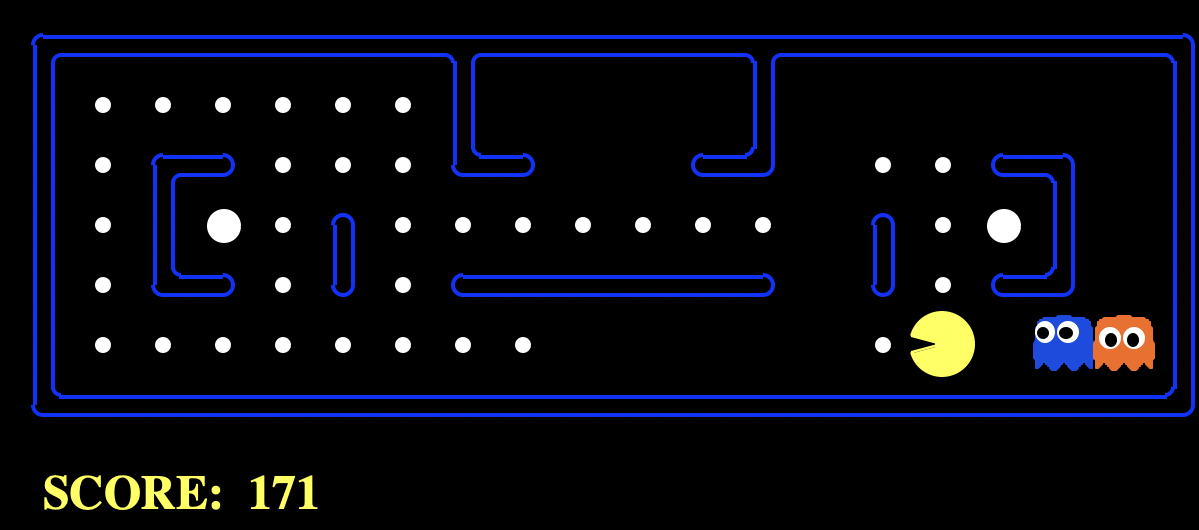
Throughout the course, we implemented a rational pacman agent through different techniques 1. mini-max + alpha-beta pruning and bounded lookahead and 2. Q-learning. Since these assignments were fairly guidedd, I want to execute an RL project from scratch in the future in different settings.
iSAM2 Optimization for CMR 24a Car
Club
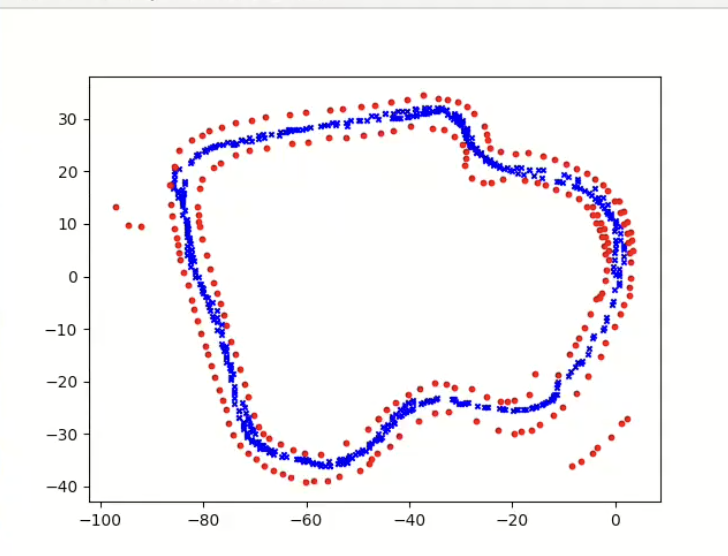
My project through the semester was a simple optimization function to our current implementation of iSAM2 algorithm, which estimates the car pose based on landmark positions of cones outlining the race track. From storing a cone cache of newly observed cones during data association, there can be a new step to be "more sure" of what cones are new or existing cones based on estimated poses. Without proper track testing, this was all tested through rosbags.
Hardware
FRC Robot
Club
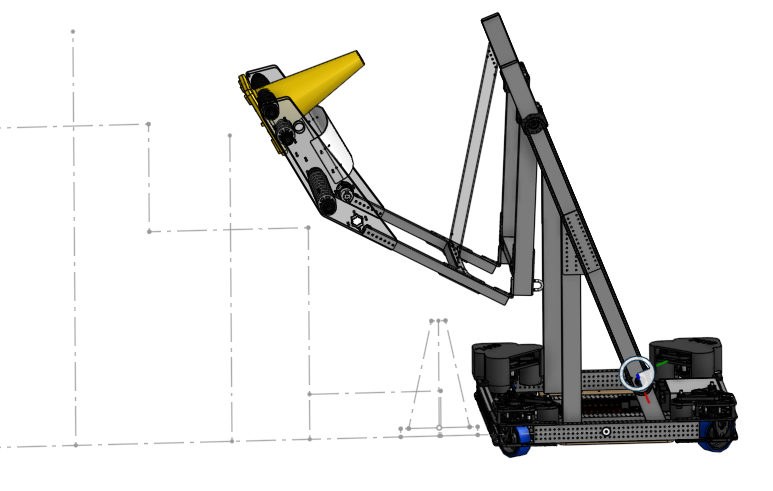
Led the design, fabrication, assembly, and programming of a improved version of the open-source "everybot" for FRC competition in 2023's Charged Up game. The main changes were an omnidirectional drivetrain and lowered positioning of our 4-bar linkage arm. This helped develop my elementary mechanical knowledge that would be beneficial for smaller hardware-related projects

FPV Drone
Personal
A simple wiring, assembly, and installation for a quadcopter FPV drone. This was preliminary in case I ever wanted to design and build my own fixed-wing drone one day.